«アビオニクス関連(2-2)»

- 航空機先進搭載機器システム技術の研究
- パイロットワークロード低減アビオニクス技術の研究
- 戦闘機用統合火器管制技術の研究
- 将来ミサイル警戒技術に関する研究
- 先進RF自己防御シミュレーションの研究
- 戦闘機等のミッションシステム・ インテグレーションに関する研究
[航空機先進搭載機器システム技術の研究]
2010〜2012年
«概要»
航空機のステルス性及び高運動性向上並びにパイロットワークロードの低減を図るための、主要な搭載装備であるアビオニクス・システム等に関する先進的な技術に関する研究
[パイロットワークロード低減アビオニクス技術の研究]

2010〜2012年
«概要»
航空機のパイロットワークロードの低減を図るための、主要な搭載装備であるアビオニクス・システム等に関する先進的な技術に関する研究
«補足»
将来の戦闘機はデータリンク等を介して僚機等と連携するとともに、非RFセンサ等を操作制御し、搭載兵装の発射管制を実施することが想定されている。このような状況下で任務達成能力の向上を図るためには、パイロットのワークロードを低減し、状況認識を向上させる必要がある。このために適用可能な表示機器等の要素技術について検討を実施した。
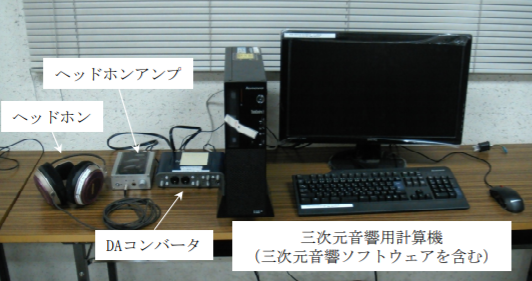
本研究の一環として、防衛航空機用途への適用例のない三次元音響について、基礎的な試験を実施して技術課題を明確化した。
将来の戦闘機の PVI(Pilot Vehicle Interface:パイロット・ビークル・インタフェース)システムとして
①HMD(Helmet Mounted Display:ヘルメッ
ト・マウント・ディスプレイ)
②音声認識
③三次元音響及び大型HDD(Head Down
Display:ヘッド・ダウン・ディスプレイ)
を適用することで、従来の PVI システムに比べて直感的な状況認識を助けることが期待できる。
そのため、本研究ではこれらを構成する技術の動向について調査を行い、技術課題等を検討した。
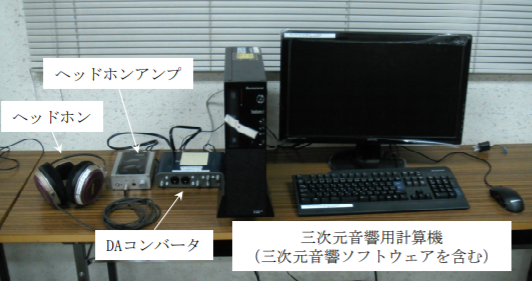
試作された3次元音響装置の概要
いずれの技術についても民生分野での発展が著しく、戦闘機に特有の周囲環境等の課題を除いて実用レベルにあることが分かった。
また、三次元音響装置を製作して静的な音像定位試験を行うことで認識率データの取得を実施した。

認識率についてのデータ
これにより三次元音響システムの構築に向けて頭部伝達関数の個人適応等の技術課題があることが確認できた。
[戦闘機用統合火器管制技術の研究]
2012〜2022年(所内試験の期間が延長)
«概要»
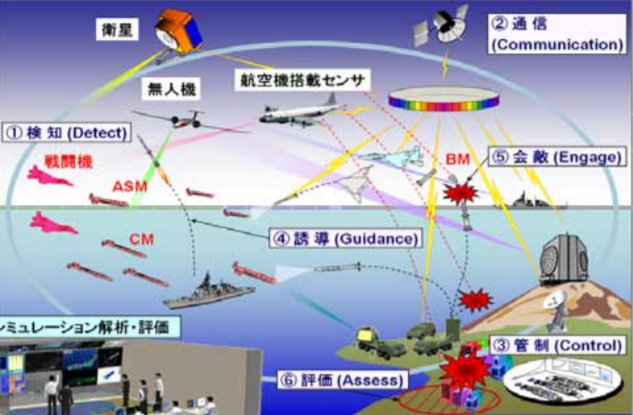
地上レーダー等の各種アセットと連接したネットワーク中心の戦闘環境空間において、戦闘機間のセンサ及びウェポンを高速データリンクを介して統合的に管制し、射撃機会の増大及び射撃効率の向上を図る統合火器管制技術についての研究
«背景・目的»
周辺国では第4世代戦闘機の配備が進み、既に数的には劣勢となっている。また、ステルス性を有する第5世代戦闘機の開発・配備も行われている。従来の戦い方ではステルス機や数的劣勢といった状況への対処は困難である。
これらへの対処ため、ネットワークを中心とする防空体制構築が必要であり、対ステルス機レーダも含め各種研究が行われている。その中でも戦闘機は将来の防空体制を構築する要素の1つとして位置づけられている。
ステルス機を含めた多種多様な
経空脅威に対処する防空体制
「将来の戦闘機の研究開発ビジョン」ではステルス機・数的劣勢を克服する手段として、クラウドシューティングによる戦闘機の情報化・知能化が提唱された。
次世代の戦闘機が第5世代機を上回りかつ対処可能な技術の1つとして、地上レーダー等の各種アセットと連接したネットワーク中心の戦闘環境空間において、戦闘機間のセンサ及びウェポンを高速データリンクを介して統合的に管制し、射撃機会の増大及び射撃効率の向上を図る統合火器管制技術を研究する。
«詳細»
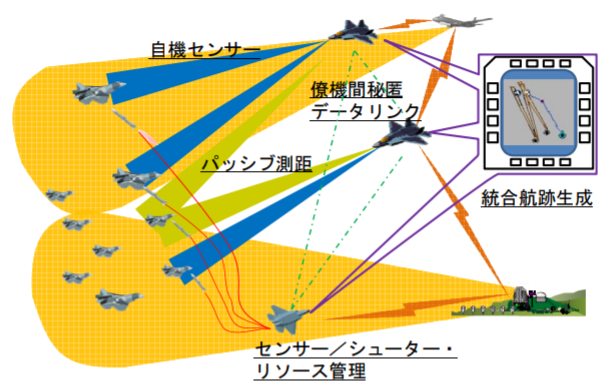
本研究の実施により達成を目指す、戦闘機用統合火器管制技術の特長について以下に述べる。
①ネットワークを用いた外部アセット(地上
レーダ、AEW等)との連接と情報共有
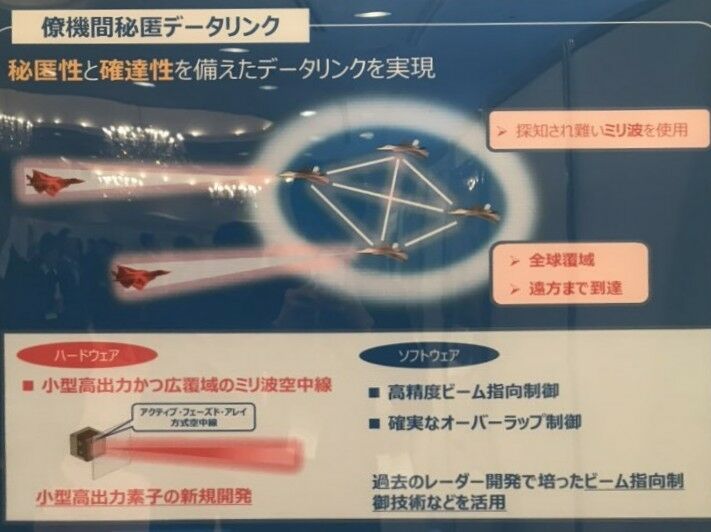
②僚機間の高速秘匿データリンク
・指向性を持たせたミリ波通信による秘匿性の確保と
大容量通信の実現
・高精度高出力なビーム制御及び全球覆域による遠方
までの確達性の確保
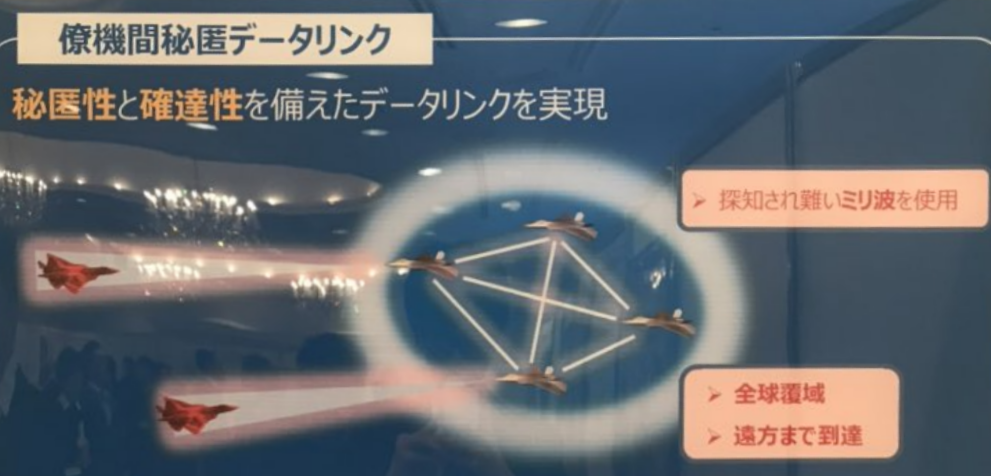
目標情報の共有を保証する僚機間秘匿データリンク
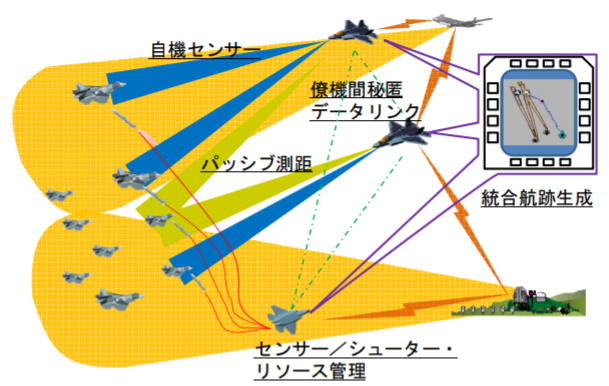
③統合航跡生成
・僚機間秘匿データリンクを用いて、自機と味方機の
情報を統合し
・編隊全体で探知した情報として共有
・自機の探知外の目標も探知・射撃が可能

統合航跡の生成
編隊内の探知情報を統合し共通の目標情報を共有
④パッシブ測位
・自ら電波を発しないIRSTなどの僚機間の光学センサ
の情報を統合
・パッシブな手段による測距を含めた測位を実施(従
来はIRSTは方探情報のみの取得であり、測距は不可
能)
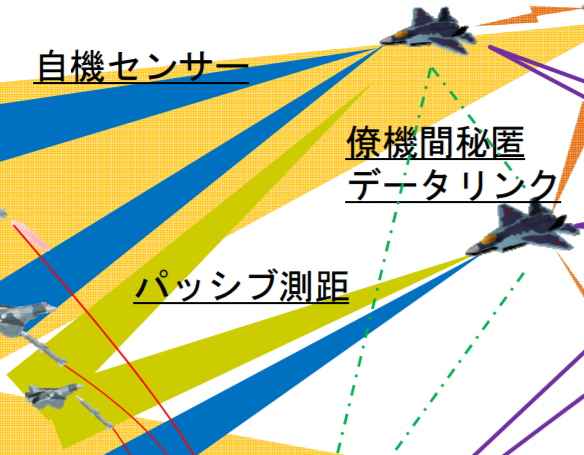
パッシブ測距の概要
IRセンサを用いた僚機間の三角測量によ
り電波を出さず目標の距離情報を得られる
⑤センサ/シュータ・リソース管理
・統合的な誘導弾の管制発射の支援
・回避判断の支援
リソース管理の概要
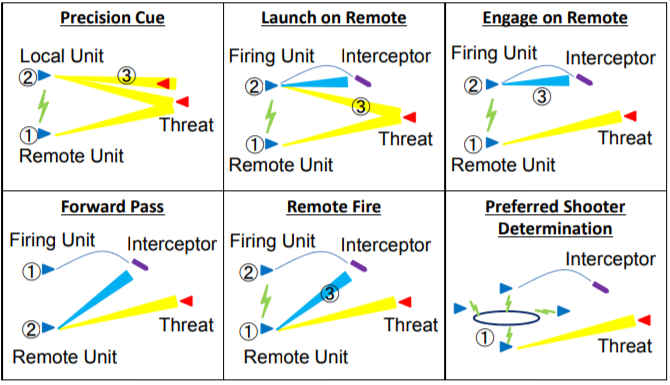
⑥上記の①〜⑤技術を適用したクラウドシュ
ーティング
・Preferred Shooter Determinatiom
ー適切なシュータの決定
我彼の位置関係等に応じて編隊内の最適なセンサー
機、シュータを決定
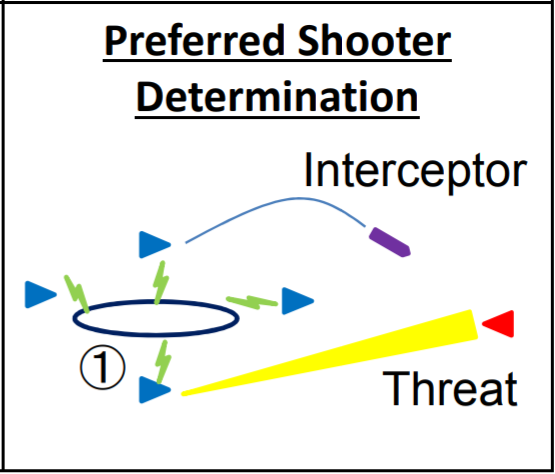
Preferred Shooter Determinatonの概要
・Precision Cue
―精密照準
僚機間の測定情報を統合し目標の位置情報の精度を
向上
目標の位置情報を取得し走査範囲を局限してその分
の電力をビームとして照射―より遠距離での高精度
な測定を可能にする
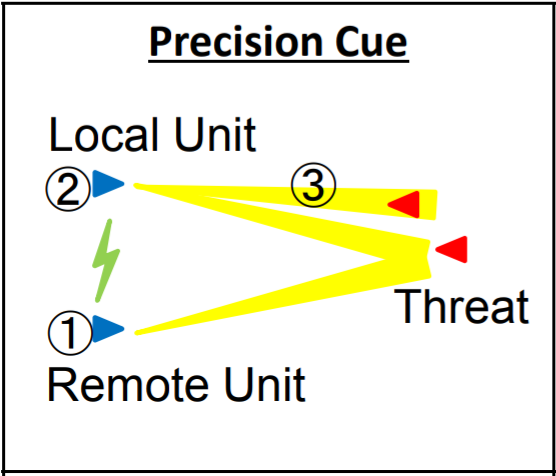
Precision Cue の概要
・Launch on Remote
―遠隔発射
シュータと僚機の双方で目標を捕捉・位置情報を照
合しミサイルの発射と誘導を実施
高精度な射撃管制が可能

Launch on Remote の概要
・Engage on Remote
―遠隔交戦
目標の捕捉を僚機に委託しそれを基に発射機がミサ
イルの射撃及び誘導を実施
僚機が目標を捕捉していればシュータは目標を直接
探知せずともミサイルの射撃及び誘導が可能
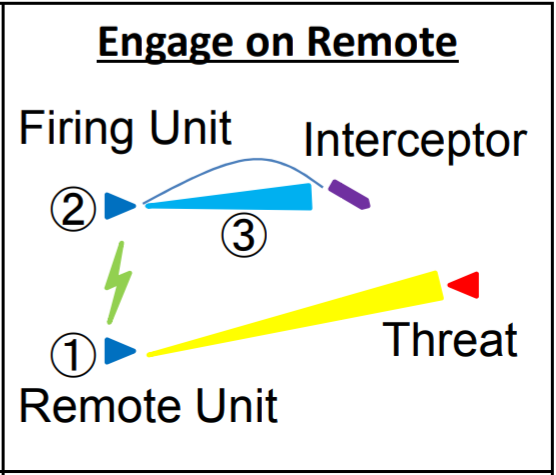
Engage on Remote の概要
・Forward Pass
―誘導権移管(フォワードパス)
シュータのミサイルの誘導権を僚機に移管し僚機が
ミサイルの中間誘導を継続発射後、シュータは脅威
から即座に離脱が可能
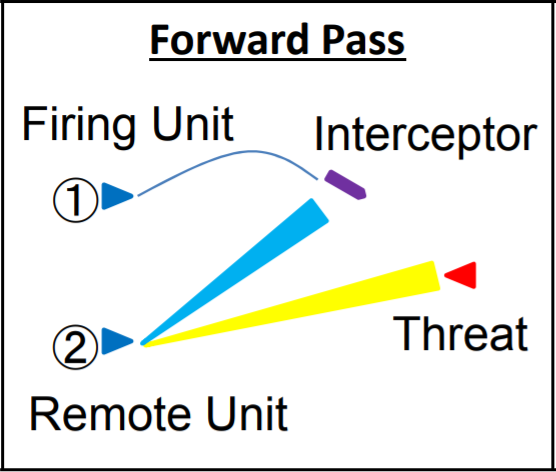
Forward Pass の概要
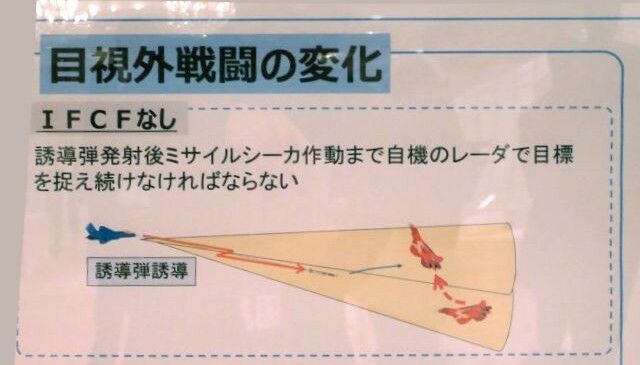
従来のAAMの誘導
ミサイルシーカが作動するまで
発射機が目標を捉え続ける必要がある
僚機がAAMの誘導を担う事で
発射機は速やかに離脱が可能
・Remote Fire
―遠隔射撃
シュータはミサイルの発射のみを行い目標の捕捉及
びミサイルの誘導を完全に僚機に委託する
発射と射撃管制の分離による任務時の自由度向上や
シュータはミサイル誘導以外の役割に専念可能
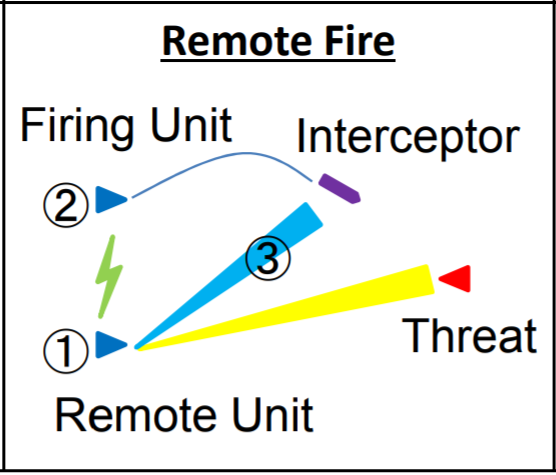
Remote Fireの概要
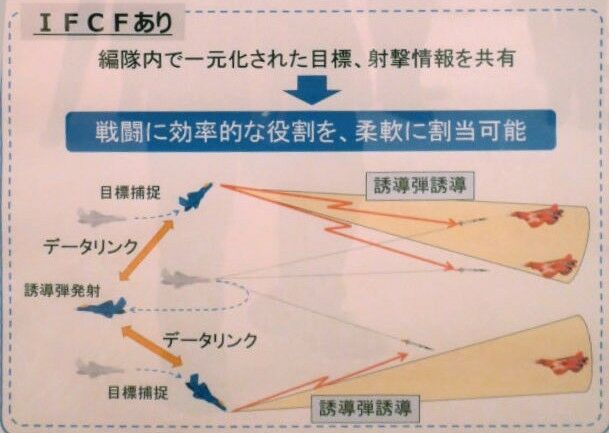
上記①〜⑤の特長を備えた統合火器管制により、空間的に分散している編隊内のセンサやウェポンを僚機間で共有する。編隊内での目標情報を統合的に処理してターゲッティングやミサイル誘導も可能とする。
これにより、生存率を向上しつつの射撃機会の増加、射撃効率及び効果の上昇を図る。
統合火器管制によって実現する戦闘コンセプト
統合火器管制によるクラウドシューティング
これらの実現に向けて、本研究では統合火器管制ソフトウェアを試作し、地上及び飛行試験によりその有効性を確認する。また、近距離高速秘匿データリンクは実際に高い指向性を持つ通信装置を試作し、統合火器管制装置と共に実機に搭載して試験を行う。
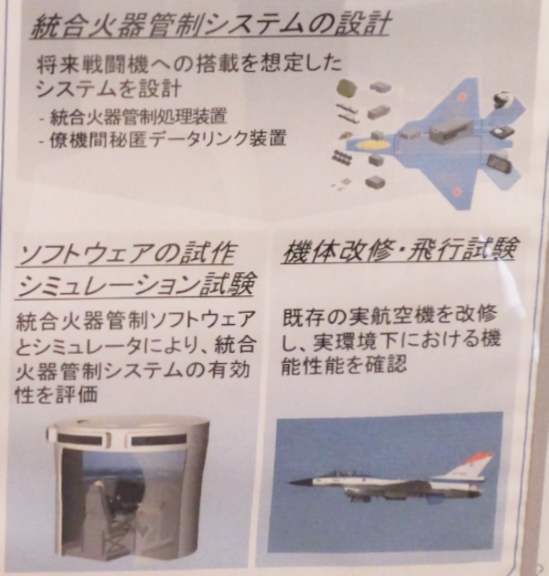
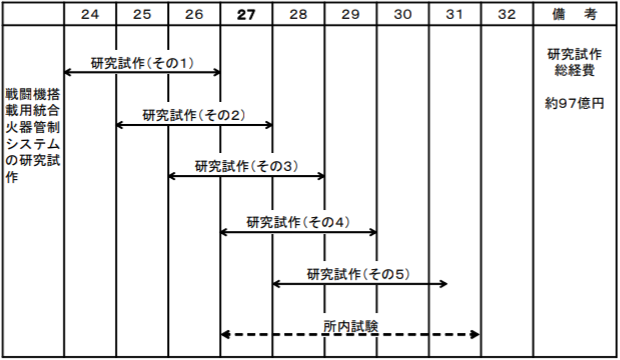
研究全体の流れ
2010年から所内試験2Aとして開始され、研究試作は2012年から開始された。174億円の総予算のもと、MHIを主契約者として各種研究試作及び試験を行っている。
研究試作(その1)では将来の戦闘機(パッシブ測位機能なし)を対象にしたシステム設計(その1)を行い、それに基づいて統合火器管制ソフトウェア(その1)を設計・製造した。併せて、統合火器管制ソフトウェア(その1)を評価するために必要なシミュレータを既保有のシミュレータを利活用し、整備した。
なお、利活用する既存のシュミレータは先行研究試作である「将来アビオニクスシステムの研究」において試作されたコックピット部などを用いる。

将来アビオニクスシステムの研究で
試作された簡易コックピットの概要(再掲)
研究試作(その2)では研究試作(その1)を基に、赤外線センサを装備し、パッシブ測位機能を有する戦闘機を想定し、システム設計(その3)を行う。それに基づいて統合火器管制ソフトウェア(その3)を設計・製造を実施した。
統合火器管制の評価を行うシュミレータは以下の要素で構成されている。
1.コックピット表示部
・模擬コックピット部: コックピットを模擬
・映像発生装置: シュミレータ映像を発生
・監視部: 6台の模擬コックピット部の戦闘状
況を外部から監視
2.統合火器管制部
・戦闘機の模擬
・統合火器管制の実行
3.シュミレーション実行制御部
・戦闘状況の表示
・シュミレーションの実行制御
4.戦域模擬計算部
・早期警戒管制機の模擬
・評価解析
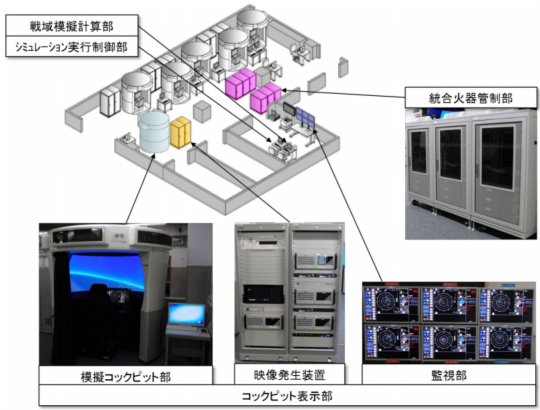
シミュレータの概要
最大18機の戦闘機をリアルタイムで模擬可能
シミュレーション試験は飛行試験に比して優位性を有している、特異な条件下における数々のシナリオに基づく試験を繰り返し実施することができる。種々の飛行環境での検証を実施するとともに本技術による将来の戦闘機の運用方法を見い出す事が可能である。
シュミレーション試験では主に編隊内で一元的に利用する目標の航跡情報を生成する「統合航跡生成技術」、複雑な僚機間連携を管理し、任務分担などをパイロットに伝達して支援を行う「センサ/シュータ・リソース管理技術」などの技術課題を確認する。
その後、目視外模擬戦闘において統合火器管制技術の有効性を確認するとともに、最も効率的で効果的な戦い方を評価することを目的として実施するものである。

また、ステルス機の探知に有効な、赤外線センサなどの自ら電磁波等を放射しないパッシブ方式のセンサを搭載した戦闘機が各々取得した目標の方位情報を編隊内で共有し、目標の位置を三角測量により推定する「パッシブ測位技術」についても確立する。
2015年の所内試験では研究試作(その1)の試作品を、統合火器管制ソフトウェア(パッシブ測位機能なし)の有効性について試験し、成果を得た。
2016年の所内試験では研究試作(その2)の試作品を用いてシミュレーション試験をパッシブ測位機能が付与された統合火器管制ソフトウェアの機能の有効性を評価し、将来の新しい戦い方を確立した。

模擬戦闘試験中のコックピット内の様子
Borozino氏提供

模擬戦闘中のMFDの画面
防衛装備庁技術シンポジウム2017・2018では統合火器管制のシミュレーション試験時の動画が公開された。
以下にシミュレーションの様子を記す。
❶状況開始
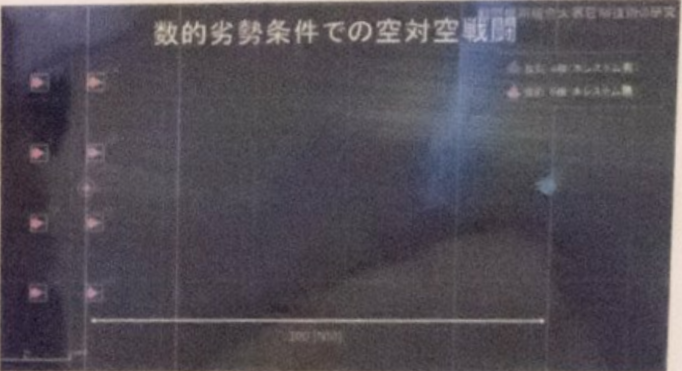
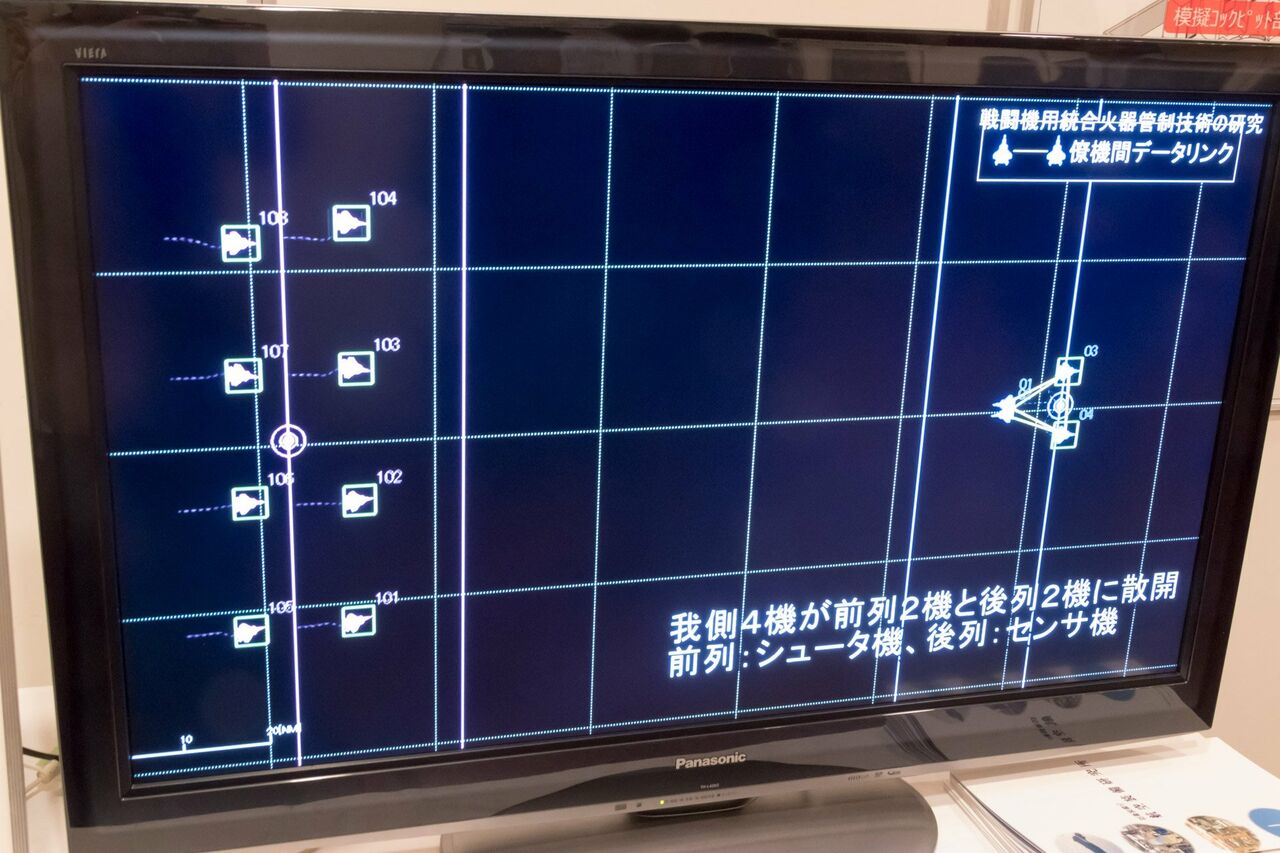
距離100海里(185km)で数的劣勢条件での空対空戦闘
我側4機(青#01〜04)と敵側8機(赤#101〜108)
我側は統合火器管制と僚機間データリンクを有する
敵側は統合火器管制を有さない
前列#01#02はシュータ機、後列#03#04はセンサ機
として我側は散開する
❷射撃開始
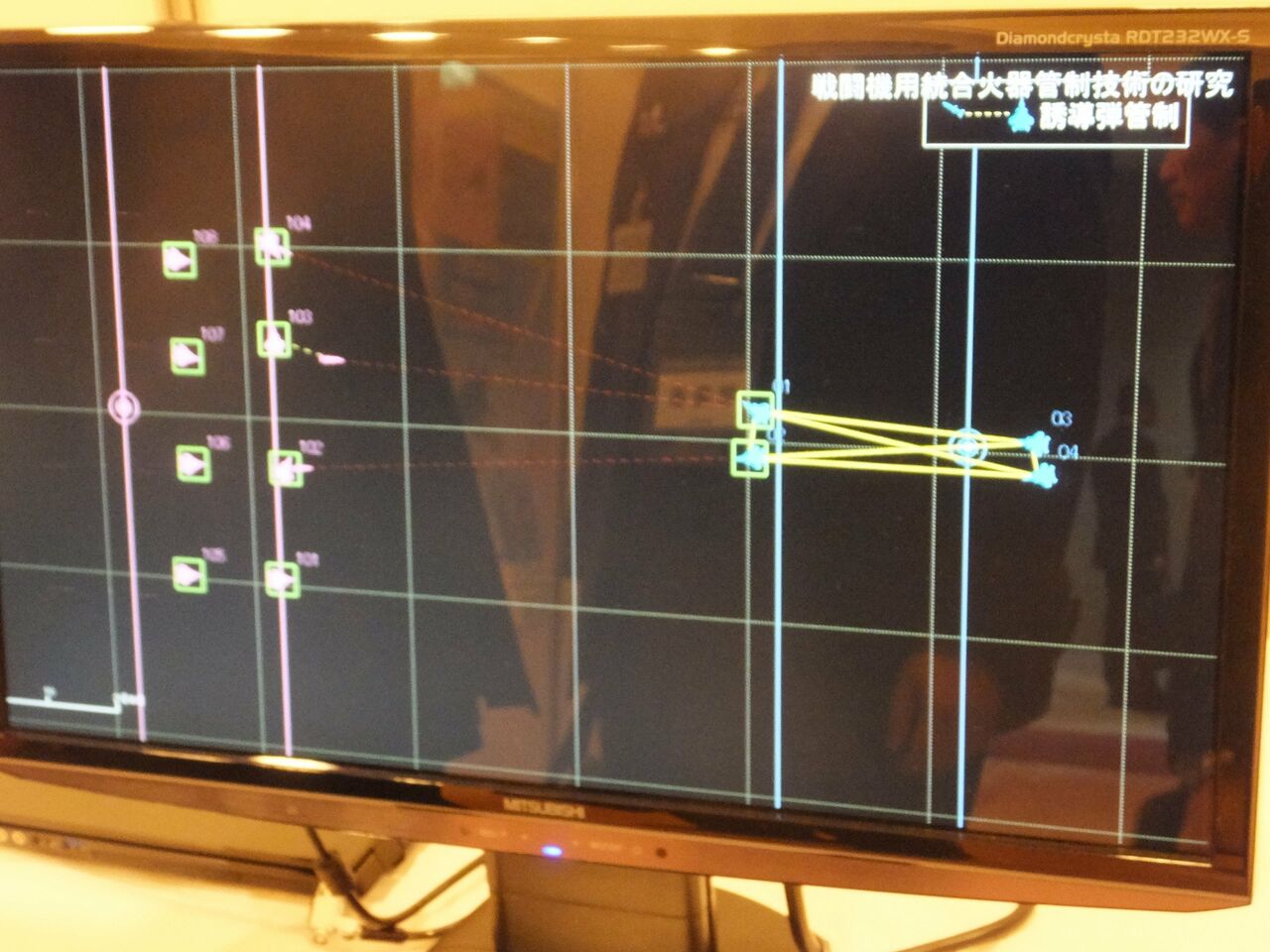
我・敵共に互いを探知し、射撃を開始
我側
#01が#103#104#107に1発ずつ計3発を発射
#02が#101#105#106に1発ずつ計3発を発射
敵側
#102#103#104#108が#01に1発ずつ計4発を発射
#101#106が#02に1発ずつ計2発を発射
#102#108のミサイルは早期に誘導を喪失する

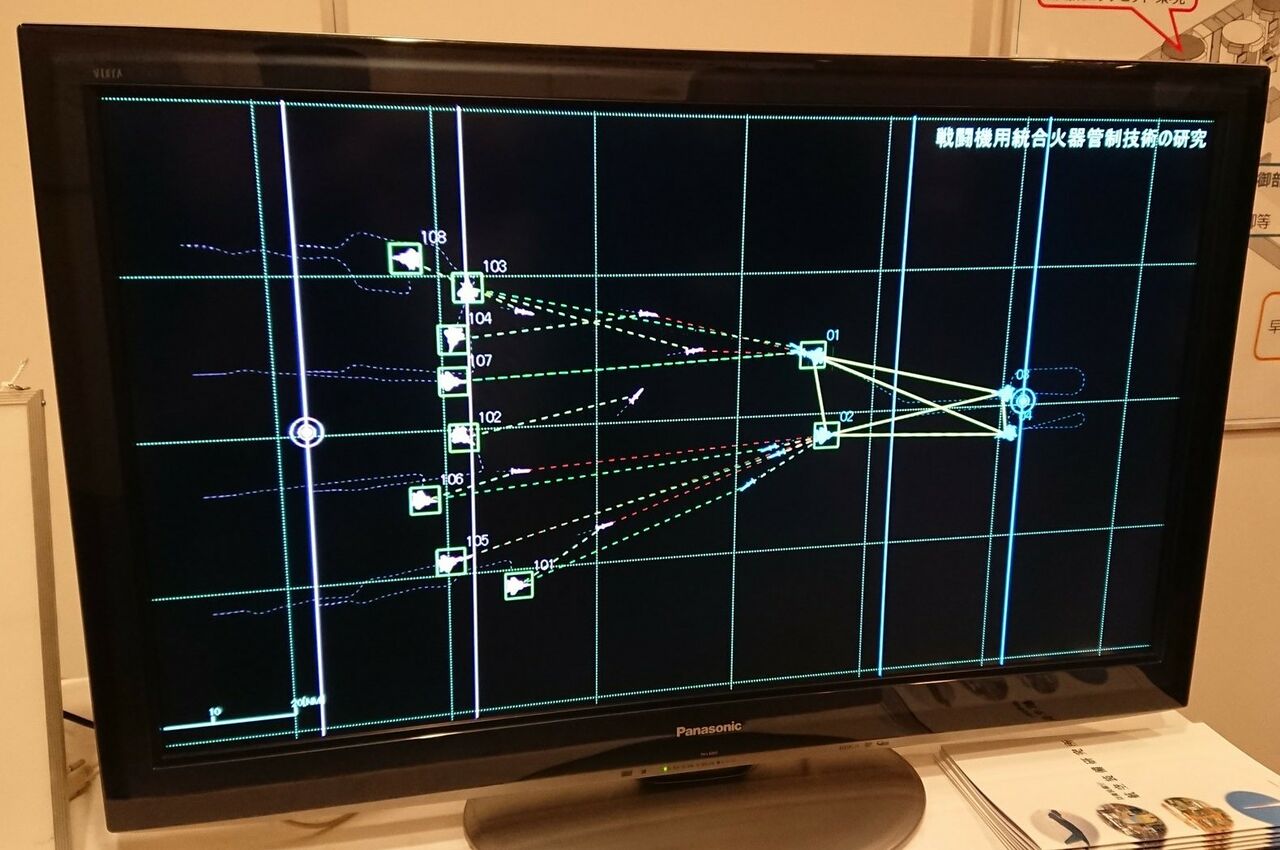
❹前列と後列の入れ替り

我側
#01#02は離脱し後列に移る。ミサイルの誘導を引き継いだ#03#04が前列になり前列と後列が入れ替る。
❷での#02のミサイルが#101に命中する。
敵側
#103が❷で発射したミサイルは命中せず。
#102#105#107がそれぞれ#03#02#01対しミサイルを
発射

我側は❷でのミサイルで#101#103#104#105#107を
撃破した。#106には命中せず。
敵側は❹までのミサイルを全て外す。
我側
#03が#102#108に1発ずつ計2発を発射
#04が#106に1発を発射 #106に命中
敵側
#102が#04に1発を発射
#108が#03に2発を発射 そのうち1発は誘導を喪失
統合火器管制の実現には、僚機間の高速秘匿データリンクが必要である。研究試作(その3)以降ではミリ波を用いた通信用の空中線の試作と試験を行う。
ミリ波を用いた僚機間秘匿データリンクの概要
ミリ波通信技術は情報通信技術研究機構(NICT)とMELCOが共同で開発した大容量通信技術を活用する。当技術は双方向通信かつ、ミリ波帯(40GHz)での大容量通信(100Mbps)やアンテナのAPAA化でのビームの電子制御により、機体姿勢に追従しての指向性を持たせた通信が特長である。
アンテナの高性能化、移動体(航空機)に搭載するための装置の小型化・軽量化、航空機の姿勢に追従して電波の放射方向を高速に制御するアンテナ制御技術などを実証している。
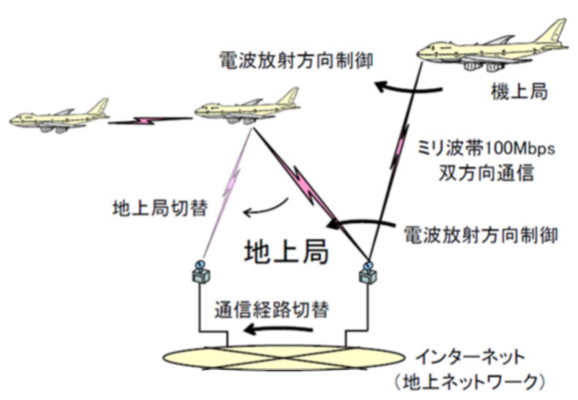
NICTとMELCOが共同開発したミリ波帯大容量通信技術
防衛用途に応用するにあたり、以下の防衛特有の事項について技術的な検討を行う必要がある。
(1)民間において実証研究に用いた機体と比較して、より機体規模の小さい戦闘機へ搭載するための小型・軽量化及び限られたスペースへの搭載に際して他の電子機器との干渉防止
(2)民間において実証された通信距離と比較して、より遠方での戦闘機の統合火器管制に必要な大容量のデータ通信を確立するためのアンテナや素子の更なる高性能化
(3)民間において実証された定常飛行もしくは緩やかな機動をする移動局(航空機)と固定局(地上)と異なり、高速飛行かつ高機動する戦闘機と戦闘機間において、安定した通信を確保するための、データリンクのビーム制御技術の確立
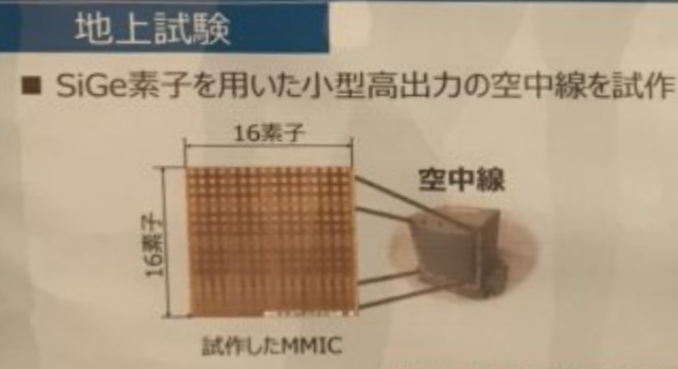
研究試作(その3)では飛行実証用データリンク装置のシステム設計が行われ、試験用の空中線が試作された。以下に試作された通信用の空中線の概要を述べる。
1.ハードウェア
・小型高出力/広覆域のミリ波空中線
・APAA方式空中線
・SiGeを用いた16x16素子の空中線
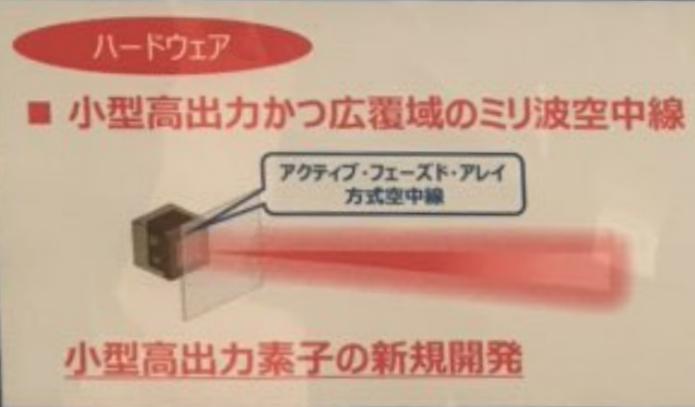
2.ソフトウェア
・機体の機動に応じて適切に、APAA空中線の
通信用電波のビームを指向する高精度ビー
ム指向制御
・確実なオーバーラップ制御
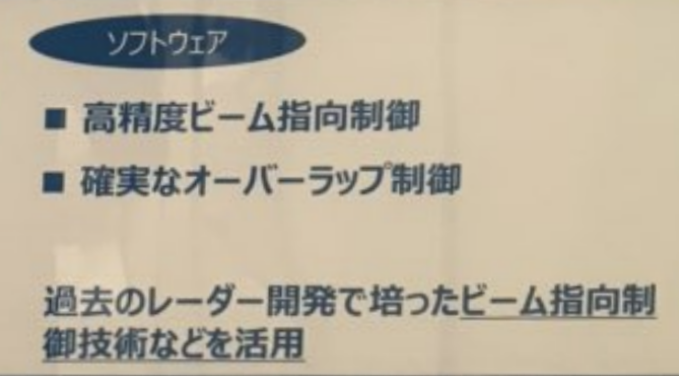
高精度なビーム制御技術
地上試験では最初に、試作された空中線の送信出力の大きさを測定した。結果、設計目標を上回る従来品の2倍近くの送信出力を確認した。
送信出力の確認後は空中線とビーム制御技術の統合が目指された。
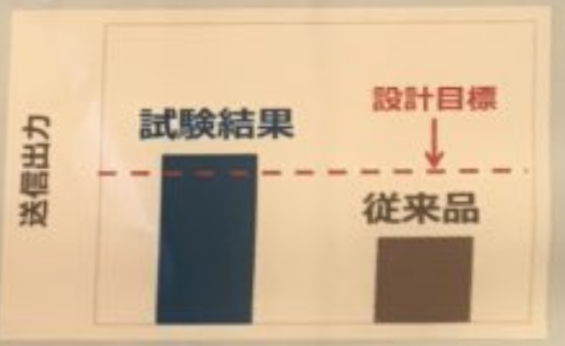
試作空中線の送信出力の試験結果
従来品の2倍近い出力を確認
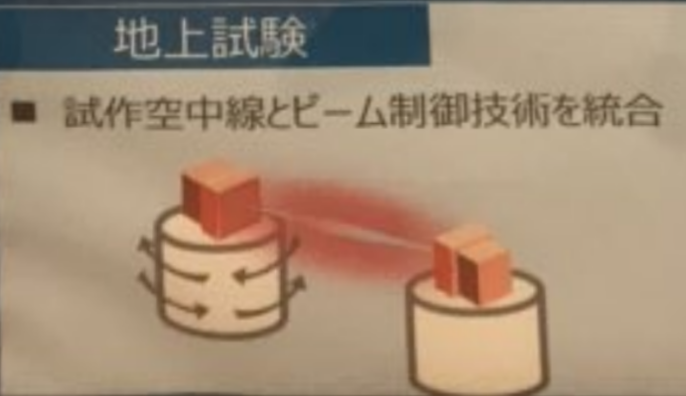
回転台に載せられた空中線同士の
ビーム制御について試験された事が読み取れる
実際の飛行環境下では水蒸気による減衰などの影響を受けてデータリンクの到達距離が短くなる。激しく動く戦闘機においてはデータリンクのビーム制御の追従性が悪くなったりする。
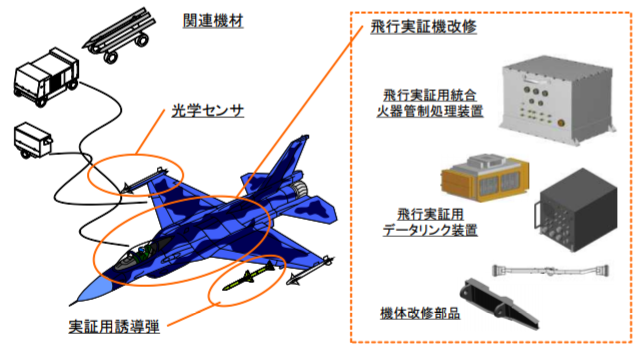
そのため、地上試験後はF-2及びT-4に飛行実証用の機体改修を実施する。統合火器管制技術及び僚機間秘匿データリンク技術を実際の飛行環境化での有効性を確認する。実際にネットワーク射撃を実施する計画である。
飛行実証にあたっては
・飛行実証用統合火器管制処理装置
・飛行実証用データリンク装置
・光学センサ
・テレメトリ機能付き実証用誘導弾
・試験用搭載機器(インターフェースボック
ス及びGPS/IMU)
・搭載母機改修(F-2及びT-4)
の設計と製造が予定されている。
・試験搭載用機器の製造
・飛行実証用データリンク装置(電源部・空
中線用電源部)の製造
・飛行実証用データリンク装置の設計
・空中線(搭載用)の設計
・搭載母機改修の細部設計(F-2)
までの進捗が確認されている。
2021年6月までに飛行実証用搭載装置の製造と、飛行実証用機としてF-2/T-4の改修を行う。
«まとめ»
ネットワーク戦闘を特長とする戦闘構想の実現のために、ミリ波帯の大容量通信技術や統合火器管制技術の研究をおこなっている。
[将来HMDシステムに関する研究]

2015〜2019年
予算化されず未実施
«概要»
本事業は、戦闘機における各種戦闘行動を効果的に実施するための表示、重量等に優れ
た将来のシステムに関する研究
«補足»
昨今の戦闘はネットワーク化されており、戦闘は高度化・複雑化が進展している。
このような戦闘においては、広視野かつ両眼、複数色表示が可能なHMDシステムを実現することで、昼夜を問わず、各種の情報を操縦者の視野内に効果的に重畳表示し、運用環境下におけるパイロットのワークロードを低減するとともに、操縦者が的確かつ効率的な状況認識及び火器管制に係る操作を可能とすることが必要である。
従来のHMDは単色表示である事や、機能が限定されており、戦闘の複雑化に対応することから以下に示すようなHMDの実現が必要であった。
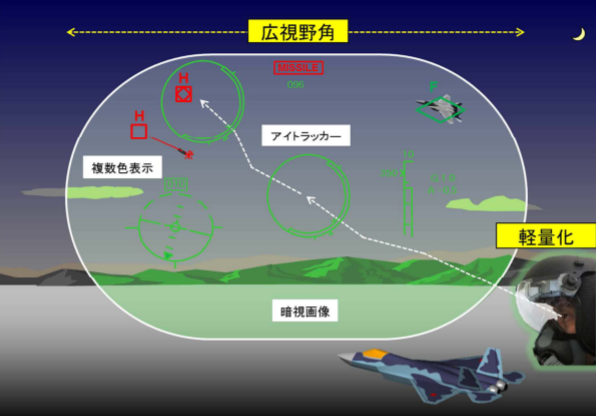
将来のHMDの概要
上記画像のような技術を適用しリアルタイムで的確な
情報判断や、ワークロードの低減に資するものである
しかし、事前の事業評価以降は研究されている様子や情報(レビューシート等)が存在せず、予算化されていないものと思われる。
[将来ミサイル警戒技術に関する研究]

2012〜2021年
«概要»
紫外線を用いた近距離のミサイル警戒に代わり、遠距離まで探知が可能な赤外線を用いてより遠方での警戒が可能となる各種航空機に適用可能な将来ミサイル警戒技術に関する研究
«背景・目的»
輸送機などは残存性の観点から、敵ミサイルの噴煙から発せられる紫外線を検知する紫外線型ミサイル警戒装置を搭載している。
しかし近年はミサイルの希煙化による放射紫外線量の低減や、オフボアサイト能力・より遠距離での発射が可能 などミサイル自体の性能の向上がなされている。
これらミサイル等の攻撃に対処する能力を向上させるためには、より遠方で警戒する能力を付加するとともに、航空機の全球方向の警戒を行える赤外線型ミサイル警報装置の開発が必要であった。
本技術は将来戦闘機のみならず大型機にも適用可能な技術である。
«詳細»
本研究では紫外線探知方式より探知距離に優れる赤外線探知方式について研究を行い、放射紫外線量の低減がなされたミサイルなどをより遠距離で探知し大幅な生存性向上を目指すものである。

将来ミサイル警戒装置の運用構想
研究試作ではMELCOを主契約者として赤外線センサや信号処理部などの試作を行っている。コスト削減のために「将来アビオニクスの研究」や「ミサイル光波妨害構成要素の研究」での成果を反映している。
総予算は100億円
地上試験でセンサ性能を確認後、C-2輸送機にセンサと信号処理部を搭載し飛行試験を行う。

試験母機となるC-2輸送機
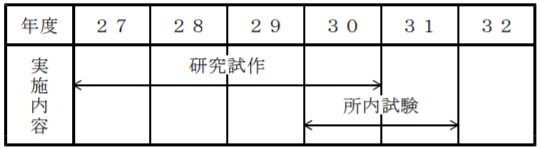
研究試作(その1)では2012〜2014年にかけて赤外線センサ2台、地上試験用の信号処理部及び電源部を試作した。
研究試作(その2)では2013〜2017年にかけて搭載用の信号処理部を試作した。
研究試作(その3)では2014〜2016年にかけて搭載試験用の赤外線センサ4台、電源部及び表示部を試作した。
研究試作(その4)では2015〜2017年にかけてC-2輸送機への搭載に伴う改修の設計及び搭載品の製造を実施した。
研究試作(その5)では2017〜2019年にかけてC-2輸送機の改修及び搭載用試作品の搭載を行う予定である。
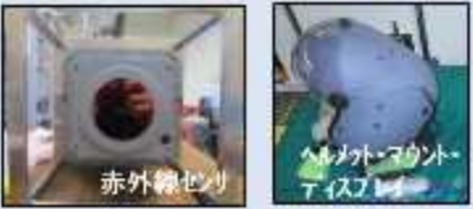
試作された赤外線センサ及びHMD
所内試験は2015年から地上試験を行った。2019年までC-2輸送機への試作品の搭載作業を実施する。その後は飛行試験を行う予定である。
飛行試験後、2021年までに試験母機を復元し研究を終了する予定である。
«まとめ»
低探知・高性能化が進むミサイルに対処するため、遠距離からの探知が可能な赤外線型ミサイル警戒装置の研究試作を行う。
地上試験後は実際にC-2輸送機に搭載し飛行試験を行う予定である。
[先進RF自己防御シミュレーションの研究]
2013〜2018年
«概要»
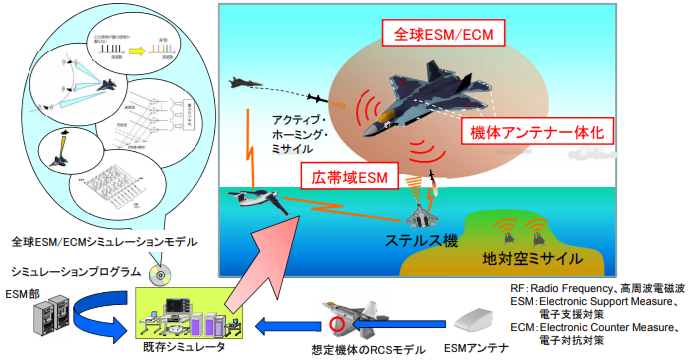
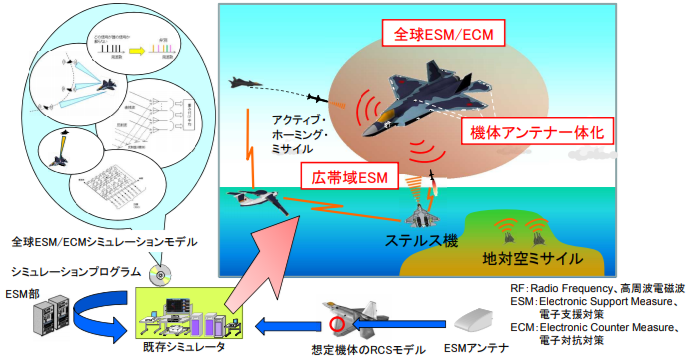
高脅威化する航空機、ミサイル等から発せられる電波を全球にわたり受信して妨害残存性を高めるESMの広帯域化、全球覆域化及びESMアンテナステルス化の検討並びに、将来のRF自己防御システムの性能検討のためのシミュレーションに関する研究
«詳細»
近年は戦闘機を探知し、攻撃する各種アセット(戦闘機、SAM、AAM等)は技術的発展は著しく、脅威動向及び技術動向から、特にステルス技術を適用した兵器システムの脅威は増大しつつある。
それらに対する戦闘機の妨害残存性を向上させるため、各種脅威が発する電波を瞬時に、かつ全球で警戒及び妨害可能なRF自己防御システムについて研究を行う必要がある。
«詳細»
本研究では地上試験用ESM試験装置を試作しシミュレータで試験を行う事で、以下のような技術的知見を得ることを目標とした。
・全球にわたり警戒し瞬時に脅威電波を探知、妨害し
残存性を向上させるシステ厶
・反射抑圧方探処理技術、瞬時探知向上技術の確立に
よるESM能力の向上及びESM追尾技術での自機
の電波放射低減によるステルス化への寄与
・機体アンテナ一体化技術の確立により、RCSパター
ンを制御したアンテナの設計手法の確立
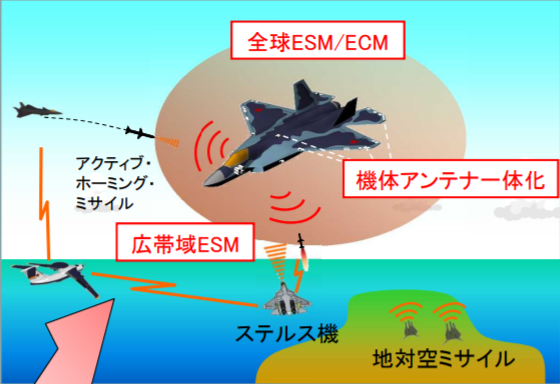
運用構想の概要
研究試作では38.2億円の総予算のもとMELCOを主契約者として各種試作を実施した。コスト削減のために「将来アビオニクスの研究」や「3次元高精度方探システムの研究」での成果物を貸付文書として利活用している。
研究試作の概要(運用構想図の左及び下部分)
研究試作(その1)では2013〜2016年にかけて先進RF自己防御システムが持つべき機能/性能を定めたシステム設計を行い、ESMアンテナを含む地上試験様子ESM装置が試作された。また、ESM装置の試験時の解析評価を行う解析評価装置も試作された。
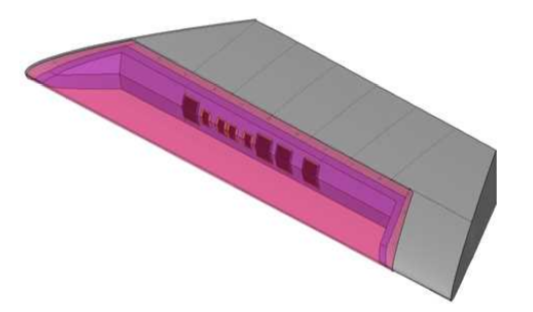
試作されたESMアンテナの概要
機体とアンテナが一体化されている
地上試験用ESM装置(ESMアンテナもこれに含む)

解析評価装置
研究試作(その2)では2014〜2019年にかけて地上試験用ESM装置及び先進RF自己防御システムの搭載性効果を確認するために、全球ESM/ECMシミュレーションモデルを有する先進RF自己防御運用評価用モデルソフトウェアの作成を実施した。
モデルソフトウェアの概要
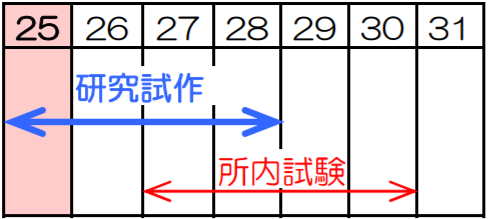
所内試験は2016年から2018年まで行われ、試作されたESM装置を用いて技術的知見を取得し研究を終了した。
«まとめ»
増大する各種脅威への残存妨害性を有する先進RF自己防御システムの実現に向け、地上試験用ESM装置を試作しシュミレーション試験を行った。
[戦闘機等のミッションシステム・ インテグレーションに関する研究]

2019〜2024年
«概要»
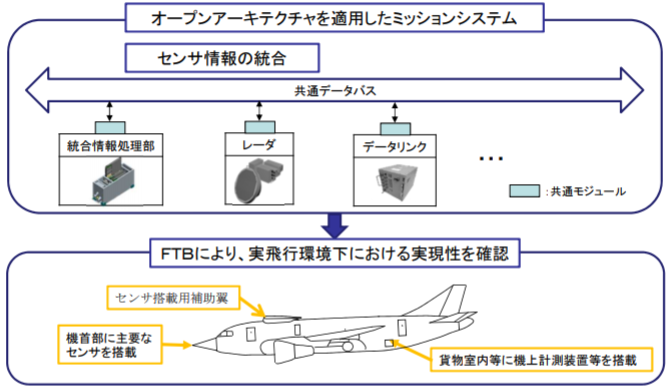
柔軟な拡張性等を有するオープンアーキテクチャを適用した複数のセンサ及び統合情報処理部から構成されるミッションシステムを試作し、FTBを活用した実飛行環境下での飛行試験等で検証を行うことにより、当該能力の基盤となる戦闘機等のミッションシステム・インテグレーション技術を確立する研究
«背景・目的»
戦闘機等の作戦及び任務の成否に影響を与える重要なミッションシステムの開発等において、その能力を最大限引き出すためには、多様なセンサ・ウェポンを統合したミッションシステムのソフトウェア及びハードウェアを細部まで把握し、自国で適切に管理することが効果的である。
ミッションシステムの開発、能力向上、改善等を自国で自由にコントロールできる能力を保持するために、柔軟な拡張性等を有するオープンアーキテクチャ(OA)を適用した複数のセンサ及び統合情報処理部から構成されるミッションシステムを試作する。
そしてFTBを活用した実飛行環境下での飛行試験等でミッションシステムの検証を行うことにより、当該能力の基盤となる戦闘機等のミッションシステム・インテグレーション技術を確立する必要がある。
※オープンアーキテクチャ:規格化を図ったインターフェースを採用したソフトウェア、ハードウェア及び通信等の仕様
FTB(Flying Test Bed):航空機に搭載される機器等の開発の際、実飛行環境下で試験評価を行うための飛行試験機
«詳細»
本研究ではOAを適用したレーダ、データリンク、統合情報処理部で構成されるミッションシステムを試作し、FTBに搭載して飛行試験を行う事で以下の目標を達成する。
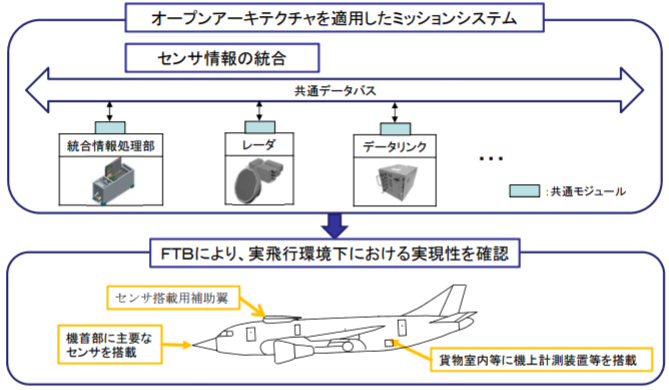
本研究の概要
(1)ミッションシステム・インテグレ-シ
ョン技術
・防衛用航空装備品に適合したOAを適用したミッショ
ンシステムによって、複雑多岐にわたるセンサ情報
を統合処理できるソフトウェア及びハードウェアを
迅速かつ柔軟に開発可能となる技術を確立する。
・センサについては関連する先行事業の成果も合わせ
て、ミッションシステムを自国で自由にコントロー
ルできる開発基盤を実現するための技術的優越を確
保する。
(2)ミッションシステムFTB技術
・FTBによって、複数センサからの大容量データを
取得するとともに、各種センサの感度等のパラメー
タ調整が容易に実施可能となる技術を確立する。
・センサについては関連先行事業の成果も合わせて、
実飛行環境下でのミッションシステムの試験及び評
価の効率的な実施並びにリスク低減を実現するため
の技術的優越を確保する。
本研究においては、試作品の設計製造及び実験室環境での試験を実施し、関連先行事業成果と合わせて実環境に相当する環境において所内試験(地上試験及びFTBによる飛行試験)を実施する。具体的な機能・性能の確認及び技術レベルの検証を行うと共に、技術的優越が確保されているか検証する予定である。
249億円の総予算のもと現在は主契約者の選定などを行い、システム設計、基本設計、統合情報処理部、センサ改修及び計測装置等を設計・製造する予定である。
«まとめ»
戦闘機のミッションシステムの開発能力及び改修の自由度を確立するため、OAを適用したミッションシステムを製造し、地上試験及びFTBによる飛行試験を行う予定である。

コメント
コメント一覧 (1)
プログラムの方もそれなりに出来上がって来ているという事ですね
ブロック0の試作機にも相当なレベルの統合火器管制システムが搭載されそうで
ワクワクします
hitomaru10
が しました
しました